


- Le Channel Sounding est une fonctionnalité Bluetooth qui permet d’estimer la distance entre deux appareils Bluetooth Low Energy (LE) avec un niveau de précision supérieur à celui des techniques Bluetooth existantes.
- Le Channel Sounding (sondage des canaux) a l’ambition d’améliorer les capacités de mesure de position via la technologie de transmission sans fil Bluetooth en offrant une précision de 10 à 30 cm.
- La fonction Channel Sounding étend la télémétrie basée sur Bluetooth au-delà des capacités des techniques existantes telles que l’indication de la force du signal reçu (RSSI pour received signal strength indication) et la détection de la direction du signal radio (DF pour Direction finding).
- Outre l’amélioration de la précision de la localisation, la fonction Channel Sounding devrait consommer moins d’énergie que les services de localisation Bluetooth existants tout en offrant une sécurité accrue.
- La fonction Bluetooth Channel Sounding vise à répondre aux besoins des applications qui exigent des techniques de positionnement précises des appareils telles que les services de localisation en temps réel, l’accès sécurisé aux bâtiments, les clés (de voiture) numériques, la navigation à l’intérieur des bâtiments, le suivi et la recherche d’objets ou d’actifs, et la détection de proximité.
Auteur : Youssef Belgnaoui – Actutem – « copyright – tous droits réservés »
La spécification Bluetooth n’a cessé d’évoluer depuis sa création en s’étoffant de nouvelles fonctionnalités pour s’étendre à de nouveaux marchés et de nouvelles applications, mais aussi pour repousser les limites des cas d’utilisation existants afin d’améliorer l’expérience de l’utilisateur et réduire le coût global du système. Dans le même ordre d’idées, la fonction Bluetooth Channel Sounding devrait permettre à Bluetooth d’adresser de nouvelles applications.
Bluetooth Channel Sounding permet d’évaluer la distance entre deux appareils Bluetooth par une méthode de télémétrie basée sur la mesure de phase dite PBR (phase-based ranging). Deux appareils Bluetooth communiquent par voie radio entre eux de manière organisée. L’appareil A transmet un signal à l’appareil B, qui mesure la phase de ce signal et le transmet à nouveau à l’appareil A avec cette même phase. L’appareil A mesure alors la différence de phase entre le signal qu’il a envoyé et le signal qu’il a reçu. Cette procédure est répétée sur plusieurs fréquences afin d’éliminer les ambiguïtés et d’optimiser la précision. L’un des appareils analyse la phase des signaux pour déterminer la distance parcourue.
Les technologies Bluetooth existantes pour la localisation
Bluetooth exploite déjà des technologies de télémétrie mettant en œuvre la méthode d’indication de la force du signal reçu (RSSI pour received signal strength indication) et les mesures de l’angle d’arrivée (AoA) et l’angle de départ (AoD). Ces techniques sont bien établies et continueront d’être utilisées. Mais elles n’offrent pas la précision suffisante pour certaines applications de localisation.
La technique RSSI mesure la distance entre deux appareils radio en s’appuyant sur le niveau d’affaiblissement du signal transmis. Intégrée sur tous les smartphones, elle ne fournit pas de valeur précise mais plutôt une indication de la distance entre deux émetteurs-récepteurs radio, avec une précision de l’ordre de trois à cinq mètres. Elle est cependant très vulnérable aux interférences causées par les obstacles. Des facteurs externes, tels que l’absorption et la diffraction des ondes radio, impactent la mesure. Le simple fait de tenir l’appareil dans la main influe sur le résultat de la mesure.
Les techniques de télémétrie par la mesure de l’angle d’arrivée (AoA pour Angle of Arrival) et de l’angle de départ (AoD pour Angle of Departure) ont été introduites pour la première fois dans la spécification Bluetooth v5.1. Ces approches fournissent une précision accrue par rapport à la technique RSSI. Elles n’évaluent pas directement la distance, mais la déduisent – par trigonométrie – à partir de la mesure des angles des signaux radio reçus ou émis. Cela permet d’évaluer la distance avec une précision inférieure à un mètre. Mais en pratique, la fiabilité des mesures dépend de facteurs tels que la présence d’obstacles et surfaces réfléchissantes. La propagation des ondes par trajets multiples nuit au résultat de la mesure.
La précision de mesure de distance par les techniques AoA et AoD dépend également fortement du nombre d’antennes exploitées, de la stabilité de la puissance d’émission, de la faiblesse du décalage de fréquence, de la dérive du signal de recherche de direction (DF) de l’appareil émetteur et de la capacité de l’appareil récepteur à échantillonner précisément les données I/Q provenant des signaux reçus.
Fonctionnement de Bluetooth Channel Sounding
La technique Channel Sounding vise à améliorer la précision de Bluetooth en matière de mesure de distance. Elle emploie une méthode de télémétrie reposant sur la mesure de phase dite PBR (phase-based ranging). L’estimation de la distance entre les deux appareils Bluetooth est obtenue en analysant la phase du signal radio transmis. La distance entre deux appareils, qui correspond au temps de vol du signal radio entre eux, est mesuré à partir des paramètres de phase. Ce qui permet de gagner en précision. Le Channel Sounding pourrait ainsi offrir une précision de 10 à 30 cm.
Cependant, différents algorithmes peuvent être mis en œuvre pour mesurer la distance à partir des données relatives à la phase des signaux radio. Chacun d’entre eux présente des avantages et des inconvénients notamment en termes de précision et de consommation d’énergie.
Pour mesurer les paramètres de phase, les deux appareils émettent et reçoivent alternativement de manière coordonnée. Cette opération est répétée plusieurs fois sur différentes fréquences (canaux). Ce qui permet de lever les ambiguïtés et d’améliorer la précision, même en présence de réflexions (trajets multiples des ondes radio) qui sont fréquentes dans les environnements intérieurs. Les opérations de sondage des canaux sont multiplexées dans le temps de manière coordonnée avec d’autres opérations radio de Bluetooth LE dans la bande de 2,4 GHz telles que la communication de données.
Dans le système Bluetooth, le Channel Sounding introduit des modifications matérielles au moyen d’une nouvelle couche physique qui utilise la modulation ASK (amplitude-shift keying ou modulation par déplacement d’amplitude) sur 72 canaux physiques. Une procédure de sondage des canaux consiste en une série d’opérations radio dites ‘’channel sounding events’’ (événements de sondage des canaux) durant lesquelles deux appareils échangent des informations qui sont utilisées pour estimer la distance. Cet échange se compose à la fois de tonalités utilisées pour l’estimation de la distance et de paquets contenant des données relatives à la procédure de sondage du canal.
Les deux appareils mesurent la distance qui les sépare en mesurant le décalage de phase ou la différence de phase entre un signal non modulé reçu et un signal d’oscillateur local (LO) à plusieurs fréquences radio. Ce qui permet d’obtenir une courbe de l’évolution de la différence de phase mesurée en fonction de la fréquence, qui est à son tour utilisée pour déterminer la distance entre les deux appareils.
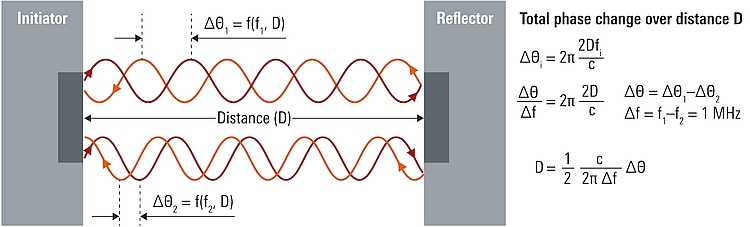
Selon la norme Bluetooth Channel Sounding (CS), si le dispositif A (initiateur) mesure la distance qui le sépare du dispositif B (réflecteur), l’initiateur commence la télémétrie en transmettant une tonalité non modulée. Le réflecteur mesure la phase du signal entrant par rapport à l’oscillateur local et transmet ensuite une tonalité non modulée à l’initiateur. Ensuite, l’initiateur mesure la phase du signal entrant par rapport à l’oscillateur local.
L’échange de tonalités (entre l’initiateur et le réflecteur) et les mesures de phase (à l’initiateur et au réflecteur) sont effectués à des fréquences multiples dans la bande Bluetooth de 2,4 GHz (par pas de 1 MHz). Avec les mesures de phase de l’initiateur et du réflecteur, les différences entre les phases relatives et les oscillateurs locaux des appareils sont corrigées sur toutes les fréquences. Après la correction de phase, le décalage de phase réel mesuré à chaque fréquence est représenté sous la forme d’une courbe de la différence de phase mesurée en fonction de la fréquence. Dans des conditions optimales, le tracé des mesures de la différence de phase en fonction de chaque fréquence est une droite dont la pente représente la distance entre l’initiateur et le réflecteur.
Sécurité renforcée contre la manipulation des signaux
Outre sa faible précision, la technique RSSI présente un risque pour la sécurité puisque le niveau du signal peut être manipulé dans un but malveillant.
Par exemple, dans les cas d’utilisation sensibles à la sécurité tels que les systèmes de portes intelligentes, un pirate pourrait élever le niveau du RSSI pour tromper le système et lui faire croire qu’une personne est plus proche qu’elle ne l’est en réalité. Ces vulnérabilités rendent le RSSI inadéquat pour les applications exigeant un niveau de sécurité élevé.
Dans le cadre de Bluetooth Channel Sounding, la couche de liaison gère les procédures de publicité, de balayage, de gestion de la connexion, de communication de données asynchrones et isochrones, et de cryptage des données. En outre, son algorithme de télémétrie basé sur la phase peut empêcher les attaques de relais. Cette technique de télémétrie convient donc mieux aux systèmes de contrôle d’accès des voitures et de clés numériques.
.






