

- CAN XL est la troisième génération du protocole CAN (controller-area network) destiné à la transmission de données entre des capteurs et des systèmes de contrôle électroniques via un bus série constitué d’une paire filaire différentielle constituée de deux fils.
- Le protocole CAN XL est rétrocompatible avec les bus de précédentes générations CAN et CAN FD (Flexible Datarate) qui sont déployés dans une variété de systèmes électroniques embarqués dans les véhicules, les équipements médicaux, les engins de manutention et de travaux publics, les machines industriels, les systèmes numériques et électrotechnique…
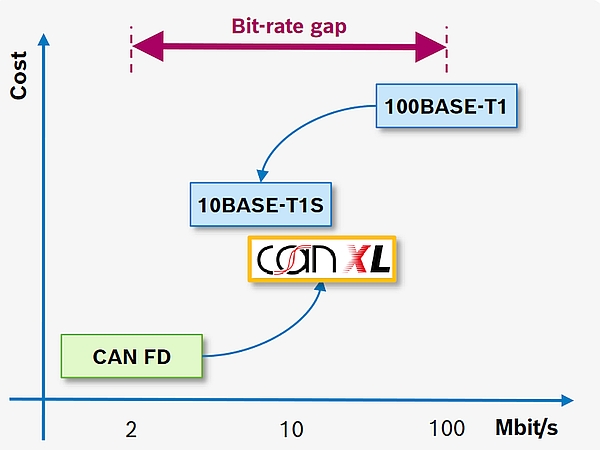
- L’un des objectifs de CAN XL est de combler l’écart de débit entre les bus CAN et CAN FD classiques et l’Ethernet 100BASE-T1
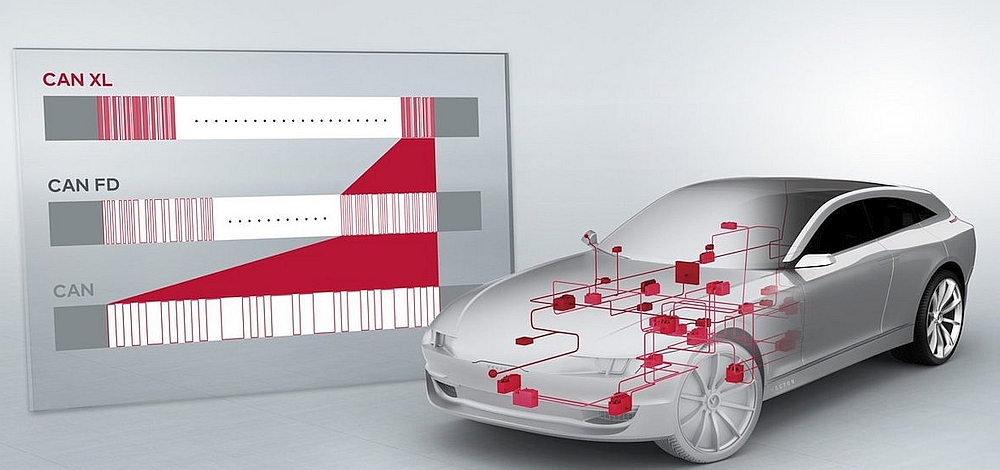
- CAN XL prend en charge des débits binaires plus élevés et des charges utiles plus longues que ses prédécesseurs. Ce qui permet d’atteindre des taux de transfert de données allant jusqu’à 20 Mbit/s et jusqu’à 2048 octets par trame.
- L’un des atouts de CAN XL est son évolutivité. Les données utilisateur peuvent être réglées entre 1 et 2048 octets avec une résolution d’un octet et des débits binaires dans la phase de données entre 1 Mbit/s et jusqu’à 20 Mbit/s peuvent être sélectionnés.
- Le second avantage du CAN XL est sa flexibilité. Grâce aux nouvelles technologies d’émetteurs-récepteurs, des topologies de réseau plus complexes peuvent être appliquées, telles que les étoiles et les longs stubs.
- Un nouveau type d’émetteur-récepteur CAN SIC XL a été introduit afin de supporter les taux de transfert de données plus élevés. Il se caractérise par des fronts de signaux rapides, un faible taux de rebond et la symétrie requise pour le transfert de données à plus grande vitesse.
Auteur : Youssef Belgnaoui – Actutem – « copyright – tous droits réservés »
Du bus CAN au CAN XL
CAN (Controller Area Network) est un bus de communication série conçu pour des environnements difficiles, en particulier pour les applications industrielles et automobiles, qui réclament des capacités de transmission de données robustes avec un minimum de câblage.
Inventé à l’origine par Bosch, le bus CAN définit la liaison de données et la couche physique du modèle d’interconnexion des systèmes ouverts (OSI), fournissant une solution de réseau de bas niveau pour les communications à grande vitesse à l’intérieur des véhicules et d’autres équipements. Le bus CAN a notamment été développé pour réduire le câblage, de sorte que les unités de contrôle électronique (UCE) séparées à l’intérieur d’un véhicule puissent communiquer avec une seule paire de fils.
Créé en 1992, CAN in Automation (CiA) est le groupe international d’utilisateurs et de fabricants qui a standardisé au niveau international le bus CAN (Controller Area Network) dans la série de normes ISO 11898. Cette association à but non lucratif a pour objectif est de fournir une plate-forme impartiale pour les futures spécifications et normes relatives au bus CAN.
CAN XL (Controller Area Network eXtended data-field Length) a été développé par CAN in Automation (CiA). Il s’agit d’un complément du protocole CAN spécifié par la norme ISO 11898-1. CAN XL vise à augmenter la cadence de transmission du bus CAN à plus de 10Mbit/s.
Cette dernière évolution du CAN vise notamment à répondre au besoin de vitesse de transmission accrue des systèmes électroniques embarqués dans les véhicules électriques et les véhicules autonomes.
Rétrocompatibilité avec CAN FD
Le protocole CAN XL intègre de nouvelles fonctionnalités à la communication via un bus CAN. Il peut supporter des charges utiles suffisamment importantes pour permettre le tunnelage du trafic Ethernet (ethernet tunneling). Il offre également la possibilité de mélanger plusieurs protocoles de couche supérieure sur le même bus.
CAN XL est rétrocompatible avec CAN FD, permettant l’accès aux protocoles CAN FD et CAN classique. Si un nœud CAN FD ne peut pas recevoir un message CAN XL, il ne détectera pas d’erreur et rejoindra l’arbitrage sur la trame suivante. Ce qui permet d’utiliser à la fois CAN FD et CAN XL sur le même bus. Pour ce faire, il faut tirer parti de l’état d’exception du protocole de CAN FD. Cela se produit lorsque le bit XLF récessif d’un message CAN XL place le nœud CAN FD dans l’état d’exception du protocole, une protection pour les extensions futures introduites dans la spécification CAN FD, ISO 11898-1:2015.
La troisième génération de CAN prend en charge les trois types de protocole (CAN classique, CAN FD et CAN XL). Comme pour CAN FD, il existe deux paramètres de synchronisation des bits. La longueur du champ de données va de 1 octet à 2048 octets.
La trame de données CAN XL
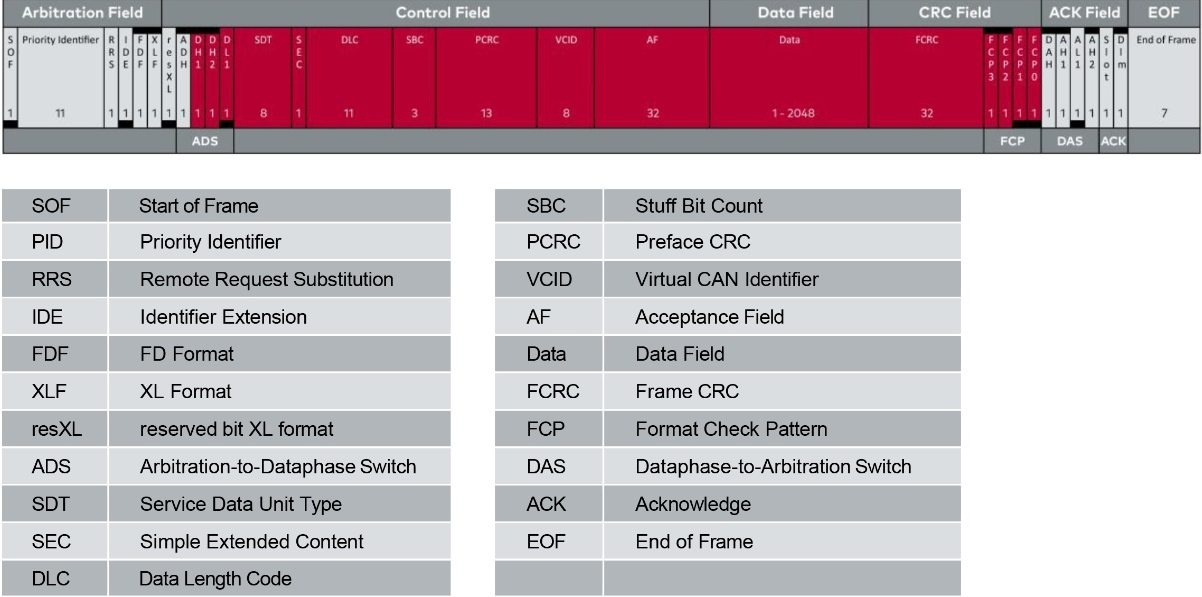
(Source : Vector Informatik)
Pour la phase de données XL, la DLL CAN XL fournit les informations nécessaires pour passer du débit nominal au débit de la phase de données XL et vice versa, et pour faire passer le mode du transceiver CAN du mode Arbitrage au mode Transmission de données/Mode Réception de données ou vice versa (codage PWM).
La prise en charge de cette commutation de mode de l’émetteur-récepteur CAN s’effectue au moyen de la configuration locale. Elle peut être activée lorsqu’un émetteur-récepteur CAN approprié prenant en charge la commutation de mode est connecté. La couche de liaison de données CAN XL fournit également des informations de gestion de couche supérieure et une fiabilité améliorée au moyen de deux champs CRC.
Nouvelles fonctionnalités et capacités de CAN XL
Autre nouveauté : la séparation du champ CAN-ID en un champ de priorité de 11 bits et un champ d’acceptation de 32 bits. CAN XL offre de nouvelles possibilités de configuration intégrées au protocole pour les couches supérieures. En outre, il existe des caractéristiques de configuration optionnelles telles que la désactivation de la signalisation d’erreur et l’activation du codage PWM (pulse-width modulation) à l’interface de l’unité d’attachement comme alternative au codage NRZ (non-return-to-zero) normal. Le codage PWM permet des débits de 10 Mbit/s à 20 Mbit/s en fonction de la conception physique du réseau.
CAN XL peut toujours être utilisé avec des émetteurs-récepteurs CAN, High Speed CAN ou CAN SIC typiques sur des bus à mode mixte ou si un débit binaire élevé n’est pas nécessaire pour l’application.
Par son débit binaire et ses capacités de charge utile de données plus élevés, CAN XL vise à combler le fossé entre CAN FD et Automotive Ethernet 100BASE-T1. CAN XL, qui prend en charge le tunneling Ethernet, est d’ailleurs conçu pour être intégré dans les systèmes de réseau TCP/IP.






