
- La société autrichienne AVL a intégré une solution de test radar de Rohde & Schwarz à sa plate-forme d’essais Drivingcube. Ce qui rend possible de tester, sur un banc d’essai de type vehicle-in-the-loop, les fonctions radar exploitées par les systèmes avancés d’aide à la conduite (ADAS) et de valider des fonctions de conduite autonome selon une variété de scénarios de conduite reproductibles.
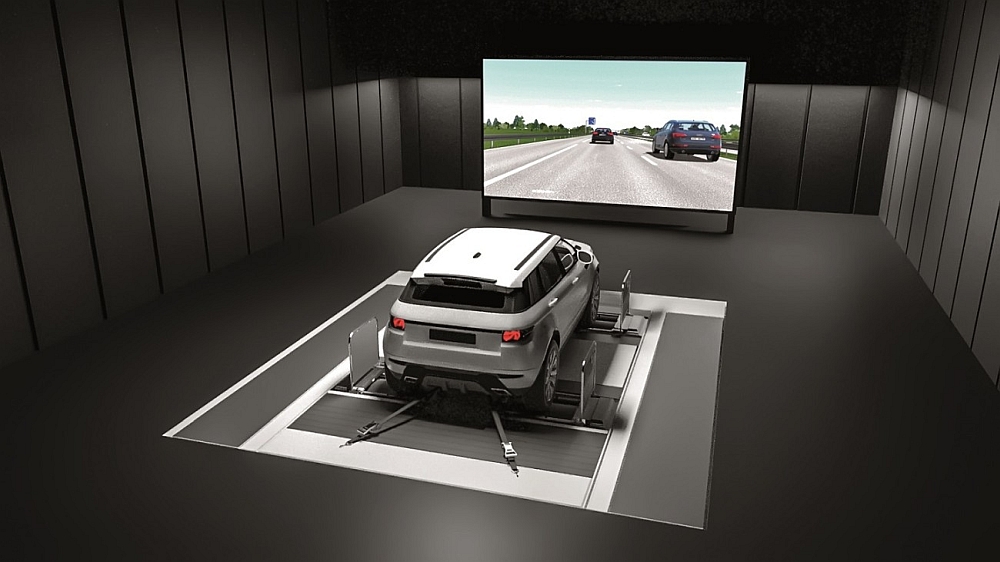
- La plate-forme Drivingcube d’AVL combine un environnement de simulation numérique et un banc à rouleaux d’essai de groupe motopropulseur sur lequel est monté le véhicule sous test.
Les systèmes avancés d’aide à la conduite (ADAS) et les fonctions de conduite autonome (AD) telles que le freinage d’urgence, la régulation de vitesse adaptative et le contrôle autonome du véhicule sur autoroutes, doivent être validés dans tous les scénarios de conduite et conditions environnementales possibles. Il est cependant impossible de procéder à l’ensemble des essais sur route en conditions réelles. Pour remédier à cette problématique, les méthodes d’essais peuvent être virtualisées en déployant une approche de type « X-in-the-loop » (XIL).
Pour ce faire, la plate-forme Drivingcube d’AVL associe des capacités de simulation logicielle à de essais réalisés sur un véritable véhicule installé sur un banc d’essais moto-propulsé et instrumenté. Il est ainsi possible de faire fonctionner le véhicule dans un environnement virtuel tout en prenant en compte les données issues de réels capteurs.
AVL et Rohde & Schwarz, qui ont déjà associé leurs solutions pour la simulation de systèmes de géolocalisation GNSS, ont poursuivi leur collaboration dans le domaine la simulation de cibles radar. Le système de test radar du fabricant allemand a été déployé sur le banc d’essai de type vehicle-in-the-loop d’AVL pour tester les fonctions radar de systèmes avancés d’aide à la conduite (ADAS) et pour s’assurer de la sûreté des fonctions de conduite autonome.
Le réseau d’antennes permet de générer des objets artificiels complexes pour les capteurs radar. Les paramètres, tels que la distance et la vitesse radiale, la taille et l’azimut, peuvent être modifiés sans déplacer physiquement les antennes ou les autres éléments. Une interface temps réel adaptable et une intégration transparente à la chaîne d’outils de test virtuel d’AVL permettent de générer et de tester une variété de scénarios de conduite. Le système évolutif et modulaire peut être utilisé sur le même banc d’essais pour tester tous types de véhicules avec différents nombres et variétés de capteurs radar. La solution est mise en œuvre pour la validation de diverses fonctionnalités : régulateur de vitesse adaptatif (ACC), aide au maintien de la trajectoire (LKA) et autres fonctions des systèmes avancés d’aide à la conduite (ADAS) et de conduite autonome (AD). Les scénarios Euro NCAP peuvent en outre être validés.



