- Le système de déclenchement (trigger) est essentiel pour utiliser un oscilloscope. Depuis son invention dans les années 1940, il n’a cessé de progresser afin de capturer des événements spécifiques du signal et améliorer la stabilité de l’affichage des formes d’onde répétitives.
- Le système de déclenchement entièrement numérique (digital trigger) que propose Rohde & Schwarz sur ses oscilloscopes de la gamme R&S RTO ainsi que sur sa nouvelle famille R&S MXO 4 et 5 présente des avantages significatifs en termes de précision de mesure, de densité d’acquisition et de fonctionnalité.
- Dans cette note d’application, le fabricant allemand présente le principe de fonctionnement d’un système de déclenchement conventionnel puis détaille les avantages d’un système de déclenchement numérique par rapport à un déclenchement analogique traditionnel.
- Un système de déclenchement numérique opère directement sur les échantillons du signal numérisé par le convertisseur Analogique/Numérique. Cette architecture permet d’assurer la synchronisation des données d’acquisition et de déclenchement. Ce qui permet de gagner en précision de mesure.
Principe d’un système de déclenchement conventionnel
Le système de déclenchement d’un oscilloscope a deux fonctions principales :
1. Assurer un affichage stable des formes d’onde des signaux répétitifs.
2. Affichage des caractéristiques spécifiques des signaux
Le système de déclenchement peut réagir à des événements spécifiques. Cela permet d’isoler et d’afficher des caractéristiques de signal spécifiques telles que des niveaux logiques qui ne sont pas atteints (« Runt »), des perturbations de signal causées par la diaphonie (par exemple, « Glitch »), des fronts lents (« Rise time ») ou une synchronisation invalide entre canaux (« Data2Clk »). Le nombre d’événements que peuvent identifier les systèmes de déclenchement et leur flexibilité de configuration ont été constamment améliorés au fil des ans.
La précision d’un système de déclenchement ainsi que sa flexibilité sont garants de la qualité de l’affichage et de l’analyse du signal mesuré avec un oscilloscope.
Mise en œuvre d’un système de déclenchement conventionnel
Aujourd’hui, la plupart des oscilloscopes sont numériques. Ce qui signifie que le signal de mesure est échantillonné et stocké sous la forme d’une série continue de valeurs numériques. Cependant, le système de déclenchement, chargé de la détection d’un événement de signal, est toujours un circuit analogique qui traite le signal de mesure initial. La figure 1 présente le schéma fonctionnel simplifié d’un oscilloscope numérique.
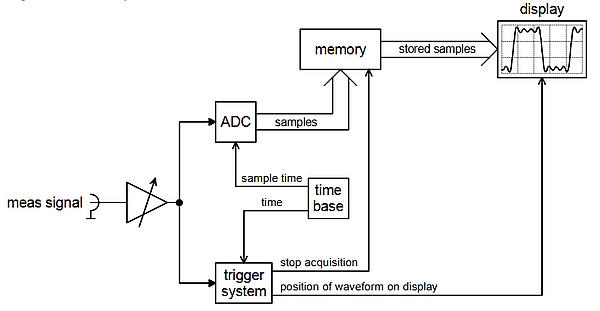
L’amplificateur d’entrée est utilisé pour conditionner le signal d’entrée afin de faire correspondre son amplitude à la plage de fonctionnement du convertisseur Analogique/Numérique (A/N) et de l’écran de l’oscilloscope. En sortie de l’amplificateur, le signal est transmis par deux voies parallèles au convertisseur A/N et au système de déclenchement. Sur l’une des voies, le convertisseur A/N échantillonne le signal mesuré et les valeurs d’échantillon numérisées sont stockées en mémoire d’acquisition. Sur l’autre voie, le système de déclenchement compare le signal à des événements de déclenchement valides (par exemple, avec la fonction de déclenchement « Edge », le franchissement d’un seuil de déclenchement).
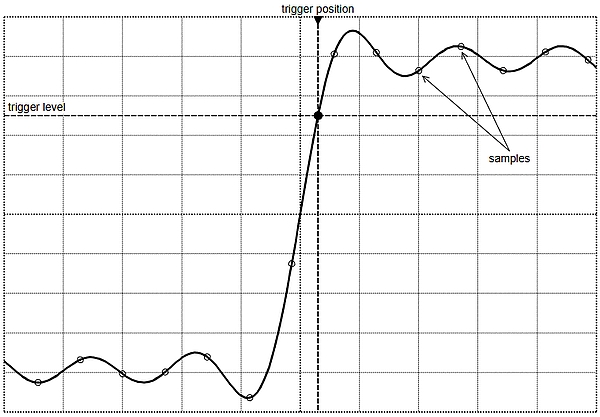
Lorsqu’une condition de déclenchement valide se produit, l’enregistrement des échantillons du convertisseur A/N est finalisé, et la forme d’onde acquise est ensuite traitée et affichée. La figure 2 présente un exemple de forme d’onde acquise et affichée. Les points d’échantillonnage numérisés par le convertisseur A/N sont représentés sur le signal par des petits cercles. Pour cet exemple, l’événement de déclenchement « Edge » avec une pente positive est appliqué. Le franchissement du niveau de déclenchement par le signal de mesure donne lieu à un événement de déclenchement valide.
Altération d’un déclencheur analogique
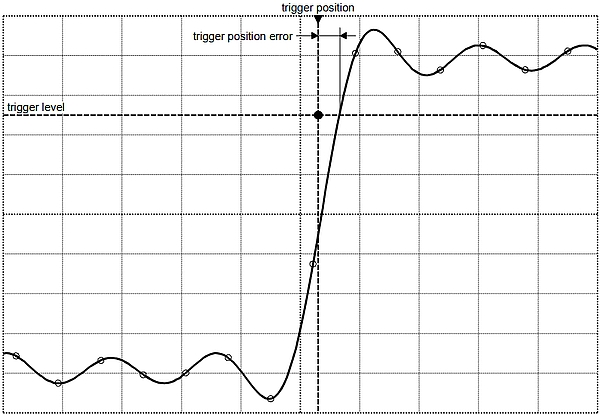
Pour assurer la précision de l’affichage du signal sur la grille de l’écran de l’oscilloscope, le moment du point de déclenchement doit être déterminé précisément. Si l’évaluation du temps de déclenchement est imprécise, la forme d’onde affichée ne coupe pas le point de déclenchement (point de croisement du niveau et de la position de déclenchement) comme le montre la figure 3.
La position du trigger peut être inexacte pour plusieurs raisons :
1. Mesure imprécise du front de déclenchement
Durant le processus de déclenchement, le signal de mesure est comparé à un seuil de déclenchement via un comparateur. Le moment du front à la sortie du comparateur doit être mesuré très précisément. À cette fin, un convertisseur temps-numérique (TDC pour Time-to-Digital-Converter) est utilisé. L’imprécision du TDC entraîne un décalage de la forme d’onde individuelle affichée par rapport au point de déclenchement. La composante aléatoire de l’erreur du TDC fait que ce décalage varie à chaque événement de déclenchement. Ce qui entraîne une gigue de déclenchement.
2. Sources d’erreurs systématiques des deux chemins du signal de mesure
Le signal de mesure suit deux chemins distincts – le chemin d’acquisition intégrant le convertisseur A/N, et le chemin de déclenchement (Figure 1). Ces deux voies contiennent différentes distorsions linéaires et non linéaires qui provoquent un décalage systématique entre le signal affiché et le point de déclenchement déterminé. Dans le pire des cas, le déclencheur peut ne pas réagir à des événements de déclenchement valides bien qu’ils soient visibles à l’écran, ou le déclencheur réagit à des événements de déclenchement qui ne peuvent pas vraiment être capturés et affichés par le chemin d’acquisition.
3. Sources de bruit des deux chemins du signal de mesure
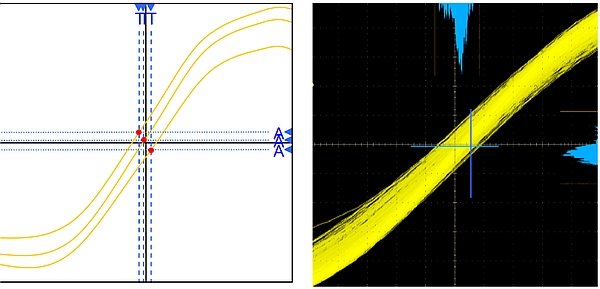
Les deux chemins vers le convertisseur A/N et vers le système de déclenchement analogique intègrent des amplificateurs avec des sources de bruit différentes. Il en résulte à nouveau des retards et des variations d’amplitude qui apparaissent comme des décalages de position de déclenchement (gigue de déclenchement) sur l’écran de l’oscilloscope. La gigue de déclenchement est représentée à droite du diagramme de la figure 4 par la superposition de différentes traces de signal décalées dans le temps et en amplitude. La partie gauche de la figure 4 montre que la gigue de déclenchement se manifeste comme un décalage vertical et horizontal aléatoire par rapport au point de déclenchement idéal.
La mise en œuvre d’un système de déclenchement numérique évitent de telles erreurs et constitue donc une solution de déclenchement plus précise pour un oscilloscope.
Concept d’un système de déclenchement numérique
La figure 5 illustre le schéma fonctionnel simplifié d’un oscilloscope numérique doté d’un système de déclenchement numérique (digital trigger).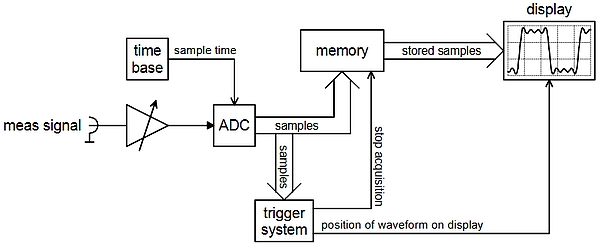
Figure 5 : Schéma fonctionnel d’un oscilloscope numérique intégrant un système de déclenchement numérique.Contrairement à un système de déclenchement analogique, un système de déclenchement numérique s’appuie directement sur les échantillons du convertisseur A/N. Le signal de mesure ne suit pas deux chemins distincts. Par conséquent, le déclencheur numérique traite le signal identique qui est acquis et affiché. Les déficiences d’un système de déclenchement analogique évoquées précédemment sont éliminées par conception.
Pour l’évaluation du point de déclenchement, le déclencheur numérique applique des méthodes de traitement des signaux numériques. Des algorithmes spécifiques détectent les événements de déclenchement valides et mesurent précisément les horodatages.
Le traitement du signal en temps réel est un défi que doit relever le déclencheur numérique pour assurer une surveillance sans faille du signal mesuré. Le déclencheur numérique de l’oscilloscope R&S RTO fonctionne sur la base du taux de conversion A/N de 10 Géch./s et doit donc traiter des données de 80 Gbit/s (convertisseur A/N 8 bits).
Comme le déclencheur numérique exploite les mêmes données numérisées que l’unité d’acquisition du signal, il est important de noter que le déclenchement n’est possible que sur les événements de signal se situant à l’intérieur de la gamme du convertisseur A/N.
Détection d’événements de déclenchement avec un système de déclenchement numérique
Pour un événement de déclenchement sélectionné, un comparateur compare d’abord le signal de mesure au seuil de déclenchement défini. Dans le cas le plus simple, le déclenchement « Edge », un événement de déclenchement est détecté lorsque le signal franchit le seuil de déclenchement dans la direction demandée (pente descendante ou ascendante).
Dans un système numérique, le signal est représenté par des échantillons. Le théorème d’échantillonnage stipule que la fréquence d’échantillonnage doit être au moins deux fois plus rapide que la fréquence maximale du signal. Ce n’est que dans ces conditions que la reconstruction complète du signal est possible.
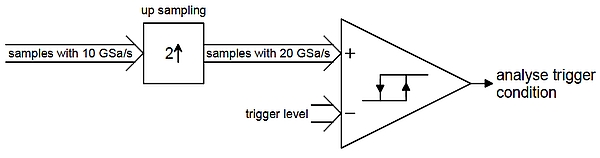
Les figures 2 et 3 montrent que la visualisation des seuls échantillons du convertisseur A/N n’est pas suffisante pour visualiser tous les détails du signal. Il en va de même pour un déclenchement numérique – une décision de déclenchement basée uniquement sur les échantillons du convertisseur A/N est insuffisante car les franchissements du seuil de déclenchement pourraient être manqués. C’est pourquoi la résolution temporelle est augmentée en suréchantillonnant le signal à l’aide d’un interpolateur à un taux de 20 Gs/s (figure 6). Après l’interpolateur, le comparateur compare les valeurs d’échantillonnage au seuil de déclenchement défini. Le niveau de sortie du comparateur change si un événement de déclenchement est détecté.
La figure 7 donne un exemple où la zone « aveugle » d’un signal est réduite en améliorant la résolution d’échantillonnage par un facteur de deux grâce au sur-échantillonnage. À gauche, les échantillons de la forme d’onde n’incluent pas le dépassement de la forme d’onde. Le seuil de déclenchement au-dessus des échantillons du convertisseur A/N ne peut pas détecter le dépassement. A droite, le taux d’échantillonnage de la forme d’onde est doublé par interpolation. Le déclenchement sur le dépassement de seuil est désormais possible.
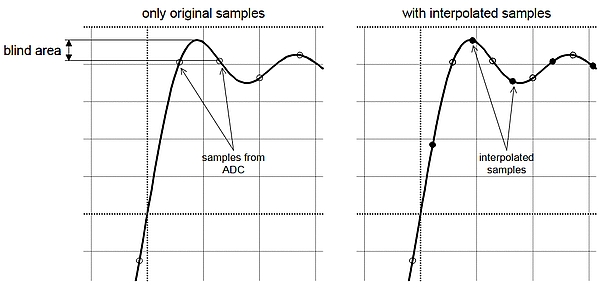
La fréquence maximale de la forme d’onde prise en exemple est de 3,5 GHz. Cet exemple montre que le système de déclenchement numérique de l’oscilloscope R&S RTO peut détecter les composantes de fréquence rapides grâce au taux de conversion A/N de 10 Géch./s.
Détermination de la synchronisation du point de déclenchement avec un système de déclenchement numérique
La condition essentielle pour une reconstruction valide du signal de mesure à un point temporel arbitraire est que le théorème d’échantillonnage (critère de Nyquist) soit respecté. L’oscilloscope R&S RTO utilise des filtres polyphasés qui peuvent calculer le signal de mesure à n’importe quel point temporel avec un rapport signal/bruit (SNR) > 90 dB. Le point d’intersection du signal de mesure et du seuil de déclenchement est calculé en temps réel par une approche itérative avec une précision de 250 fs.
Certains événements de déclenchement tels que « Glitch » ou « Pulse width » sont basés sur des conditions temporelles. L’oscilloscope R&S RTO prend en charge un déclenchement très précis sur ces événements car il détermine les points d’intersection avec le seuil en temps réel. Le timing des événements de déclenchement peut être configuré avec une résolution de 1 ps, la largeur d’impulsion minimale détectable est spécifiée à 100 ps.
Avantages du déclencheur numérique de l’oscilloscope R&S RTO
Faible gigue de déclenchement en temps réel
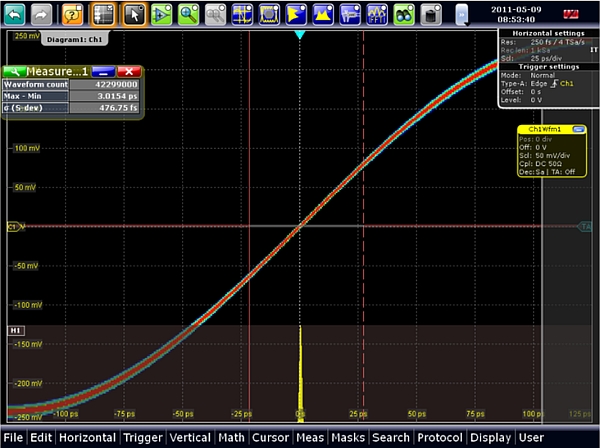
L’utilisation de valeurs d’échantillonnage identiques pour l’acquisition et le traitement du déclenchement se traduit par une très faible gigue de déclenchement inférieure à 1 ps rms pour l’oscilloscope R&S RTO. La figure 8 montre un exemple d’évaluation de la gigue de déclenchement au point de déclenchement avec un signal d’horloge de 10 MHz dont le temps de montée est de 400 ps.
Comme indiqué précédemment, l’unité de déclenchement numérique en temps réel de l’oscilloscope R&S RTO est mise en œuvre dans le chemin de traitement entre les convertisseurs A/N et la mémoire d’acquisition. Contrairement aux systèmes de déclenchement « SW enhanced » mis en œuvre à l’aide d’approches de post-traitement, il ne nécessite pas de périodes aveugles supplémentaires après chaque acquisition de forme d’onde. La plus faible gigue de déclenchement et une vitesse d’acquisition et d’analyse maximale de 1 million de formes d’onde par seconde font partie du mode d’acquisition standard de l’oscilloscope R&S RTO.
Sensibilité de déclenchement optimisée
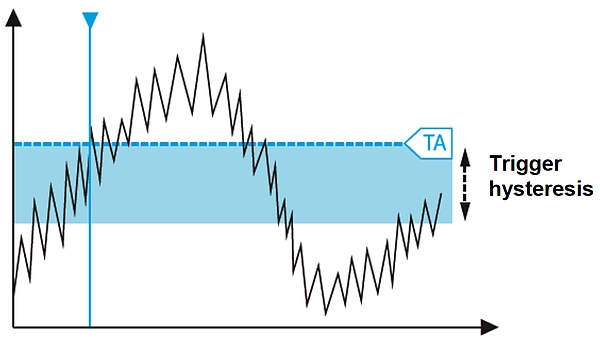
Il existe deux exigences contradictoires pour la sensibilité du déclenchement. Pour un déclenchement stable sur des signaux bruyants, un système de déclenchement nécessite une certaine hystérésis autour du seuil de déclenchement (voir figure 9). D’autre part, une large hystérésis limite la sensibilité du système de déclenchement pour les signaux de faible amplitude.
La sensibilité de déclenchement des oscilloscopes classiques est généralement limitée à plus d’une division verticale. De plus, une hystérésis plus large peut être sélectionnée avec le mode « Noise Reject » pour un déclenchement stable sur des signaux bruyants.
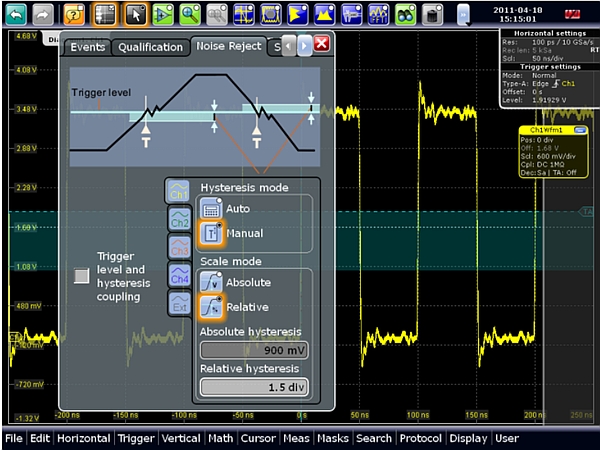
Le système de déclenchement numérique de l’oscilloscope R&S RTO permet un réglage individuel de l’hystérésis de déclenchement de 0 à 5 div pour optimiser la sensibilité de déclenchement pour la caractéristique de signal respective (Figure 10).
– En mode d’hystérésis « Auto », le micrologiciel de l’oscilloscope R&S RTO utilise une hystérésis dépendant de l’échelle verticale.
– L’hystérésis peut être augmentée manuellement dans le mode d’hystérésis « Manuel » pour permettre un déclenchement stable sur des signaux avec un niveau de bruit élevé (Figure 9).
– L’hystérésis réglée sur zéro fournit la sensibilité de déclenchement la plus élevée pour les signaux à fronts rapides.
Un autre avantage de l’oscilloscope R&S RTO qu’il convient de mentionner dans le contexte de la sensibilité de déclenchement est que le frontal à faible bruit permet un déclenchement précis jusqu’à 1 mV/div sans limitation de bande passante.
Largeur d’impulsion minimale détectable
Un autre paramètre clé d’un système de déclenchement est la largeur d’impulsion minimale détectable. Elle correspond à l’impulsion la plus étroite que l’oscilloscope peut détecter et déclencher. L’oscilloscope R&S RTO prend en charge le déclenchement stable sur les impulsions, les glitches, les intervalles et le temps de montée/descente jusqu’à 50 ps.
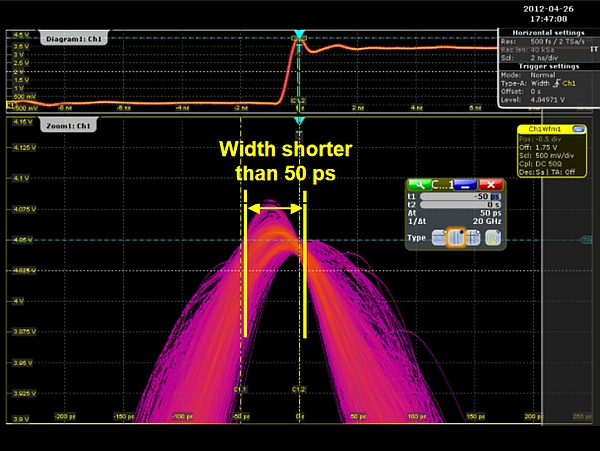
La figure 11 présente un exemple de déclenchement stable sur une largeur d’impulsion inférieure à 50 ps. Dans cet exemple, un signal TTL d’une amplitude de 3,5 V avec un fort dépassement sur le front montant est utilisé pour démontrer la sensibilité du déclenchement de l’oscilloscope R&S RTO.
Il est important, dans cet exemple particulier, de noter que l’hystérésis de déclenchement doit être réglée sur zéro pour obtenir la sensibilité de déclenchement la plus élevée.
En mode zoom, on peut voir que toutes les formes d’onde acquises remplissent la condition de déclenchement d’une largeur d’impulsion inférieure à 50 ps.
Pas de masquage de l’événement de déclenchement
Un déclencheur analogique nécessite un certain temps après une décision de déclenchement pour réarmer le circuit de déclenchement avant de pouvoir déclencher à nouveau. Pendant ce temps de réarmement, les oscilloscopes ne peuvent pas répondre aux nouveaux événements de déclenchement. Les événements de déclenchement survenant pendant le temps de réarmement sont donc masqués.
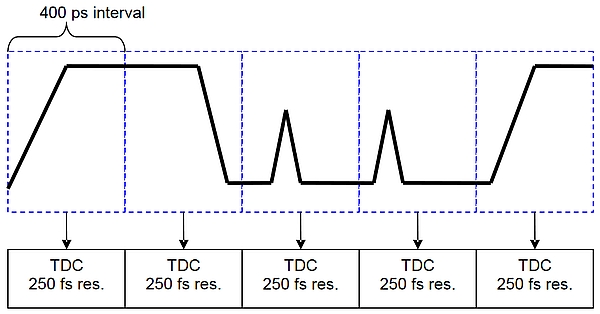
En revanche, le système de déclenchement numérique des oscilloscopes R&S RTO peut évaluer les événements de déclenchement individuels avec les convertisseurs temps-numérique (TDC) dans des intervalles de 400 ps (Figure 12) avec une résolution de 250 fs. Ceci est important pour les applications avec des conditions de déclenchement sophistiquées telles que le maintien d’un événement compté (counted event hold-off), ou des séquences de déclenchement A-B où plusieurs événements B sont nécessaires avant le déclenchement.
Filtrage flexible des signaux de déclenchement
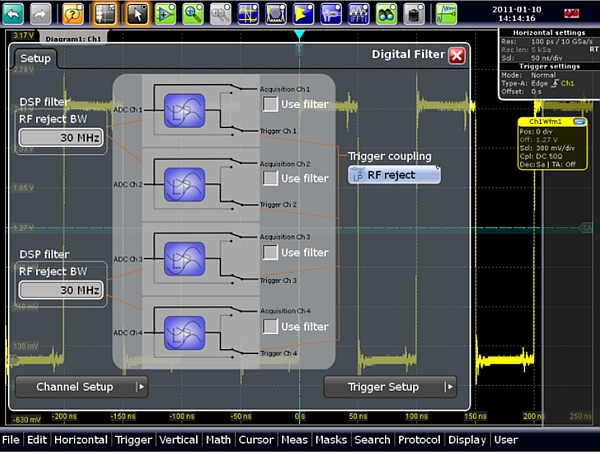
L’ASIC d’acquisition et de déclenchement des oscilloscopes R&S RTO prend en charge la programmation de la fréquence de coupure d’un filtre passe-bas numérique dans le chemin en temps réel. Les mêmes paramètres de filtre peuvent être utilisés pour le signal de déclenchement et le signal de mesure, ou pour les deux (figure 13). Le filtrage passe-bas sur le signal de déclenchement supprime uniquement le bruit haute fréquence pour le déclenchement, tout en capturant et en affichant le signal de mesure non filtré.
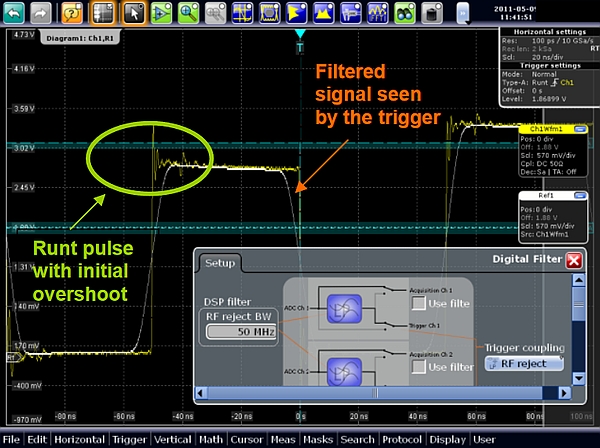
Un exemple d’application connexe est illustré à la figure 14. Ici, l’utilisateur applique un déclencheur Runt pour capturer les impulsions de données qui n’atteignent pas le niveau logique un. La configuration des seuils de déclenchement Runt s’avère difficile en raison d’un dépassement important de l’avance qui traverse la fenêtre runt. La solution consiste à appliquer le filtre passe-bas au signal de déclenchement uniquement. L’analyse du signal de mesure original et non modifié est maintenant possible.
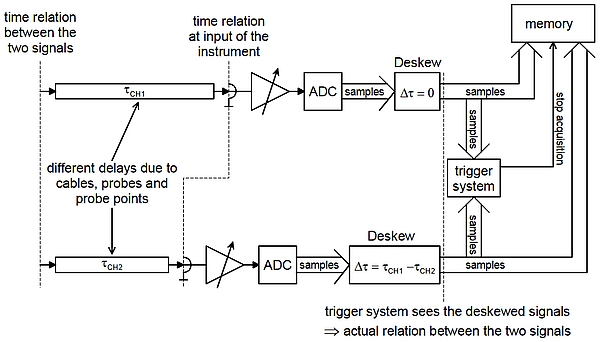
Reconnaissance du décalage des voies par l’unité de déclenchement
La relation temporelle entre les voies d’entrée de l’oscilloscope (skew) est importante pour les mesures et les conditions de déclenchement entre deux ou plusieurs signaux. Des longueurs de câbles, des sondes ou des positions de points de sonde différentes peuvent également provoquer un skew entre les voies… Les oscilloscopes numériques standard offrent une fonction de désalignement des signaux pour compenser les retards sur les différentes entrées. Le désalignement est généralement traité dans le chemin d’acquisition après le convertisseur A/N et ne peut donc pas être vu par un déclencheur analogique standard. Cela conduit à des signaux incohérents affichés à l’écran et évalués par le système de déclenchement.
Avec l’oscilloscope numérique R&S RTO, l’unité d’acquisition et l’unité de déclenchement utilisent les mêmes données numérisées (Figure 15). Par conséquent, les formes d’onde affichées à l’écran et le signal traité par l’unité de déclenchement sont cohérents, même lorsque le désalignement des canaux (de-skew) est appliqué. Comme l’oscilloscope R&S RTO utilise des filtres à retard numériques, il est possible de régler le désalignement par pas de 1 ps.
Les exemples de conditions de déclenchement inter-canaux comprennent le déclenchement sur la qualification des événements de déclenchement sur un canal (par exemple, « Edge ») et certaines combinaisons de niveaux (état « haut » ou « bas ») sur d’autres canaux.
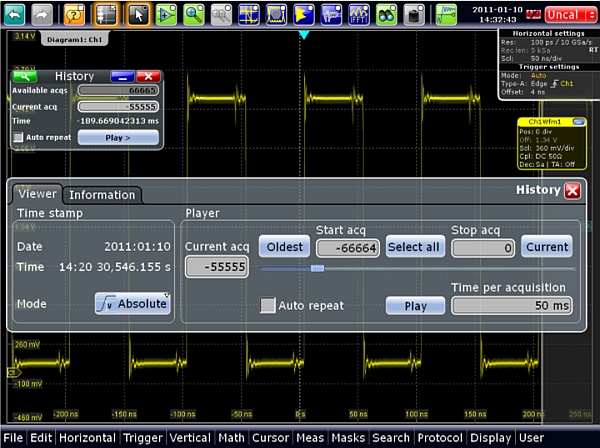
Fonction de visualisation de l’historique avec horodatage
Dans de nombreux cas, la cause réelle d’une erreur ne peut être identifiée qu’en consultant l’historique d’une acquisition de signal. Les oscilloscopes R&S RTO permettent toujours d’accéder aux formes d’onde acquises précédemment. Quelle que soit la fonction à partir de laquelle la mesure a été arrêtée, les données de forme d’onde stockées en mémoire sont immédiatement disponibles pour l’analyse. De plus, chaque forme d’onde possède un horodatage individuel permettant d’identifier clairement le moment où les événements déclencheurs ont eu lieu. En fonction de l’option de mémoire, de nombreuses données
de débogage sont à la disposition de l’utilisateur.
L’outil de visualisation de l’historique contrôle la relecture des formes d’onde (Figure 15). Les horodatages peuvent être affichés en temps absolu par rapport à l’horloge système ou par rapport à la dernière forme d’onde déclenchée. Dans ce dernier mode, la résolution temporelle de l’horodatage est d’une picoseconde. Les applications nécessitant une référence temporelle stable à long terme bénéficieront de la grande précision de la base de temps de l’oscillateur optionnel (option matérielle R&S RTO-B4).