
- Anritsu a développé un environnement de test et de simulation pour système AVP (Automated Valet Parking) en collaboration avec Dspace et Apposite Technologies.
Les clients de certains restaurants ou commerces peuvent profiter d’un service de voiturier. Un agent de stationnement professionnel se charge alors de garer leur véhicule dans des emplacements de parking. L’AVP (Automated Valet Parking) est un système qui permet de réaliser ce stationnement automatiquement, sans qu’aucun conducteur ne se trouve dans le véhicule. La version 1.0 du rapport technique AVP a été publiée par la 5G Automotive Association en juin 2022, et un schéma de fonctionnement de communication sans fil (type 2) lié à l’infrastructure du parking et aux smartphones des utilisateurs a été proposé.
L’AVP est développé comme un cas d’utilisation de la conduite autonome qui pourrait être déployé à court terme. Pour les véhicules de conduite autonome, la mise en oeuvre de l’AVP de type 1 nécessite des installations coûteuses en termes de calcul et de détection. Ce que ne réclame pas, selon Anritsu, l’AVP de type 2 pour les véhicules coopératifs communicant. Ce qui réduit le coût des véhicules et facilite la mise en œuvre de l’AVP.
L’AVP de type 2 nécessite cependant des communications de bout en bout d’une grande fiabilité. Un système de test doit donc évaluer la gestion de la qualité de service et les effets de la dégradation dans la couche IP. L’environnement de connectivité sans fil doit également être évalué. La solution de test exploite un jumeau numérique incorporant à la fois des dispositifs virtuels et réels. Cela permet de lancer les tests et la certification du système AVP Type-2 avant que les dispositifs réels ne soient disponibles.
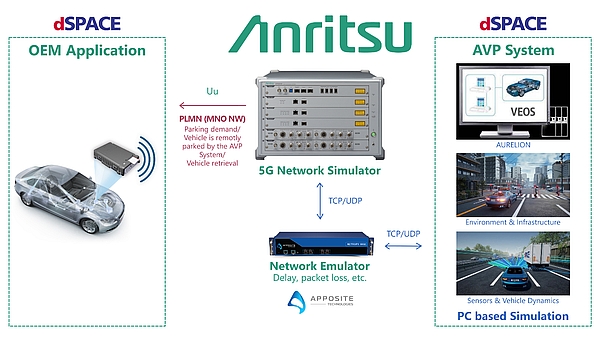
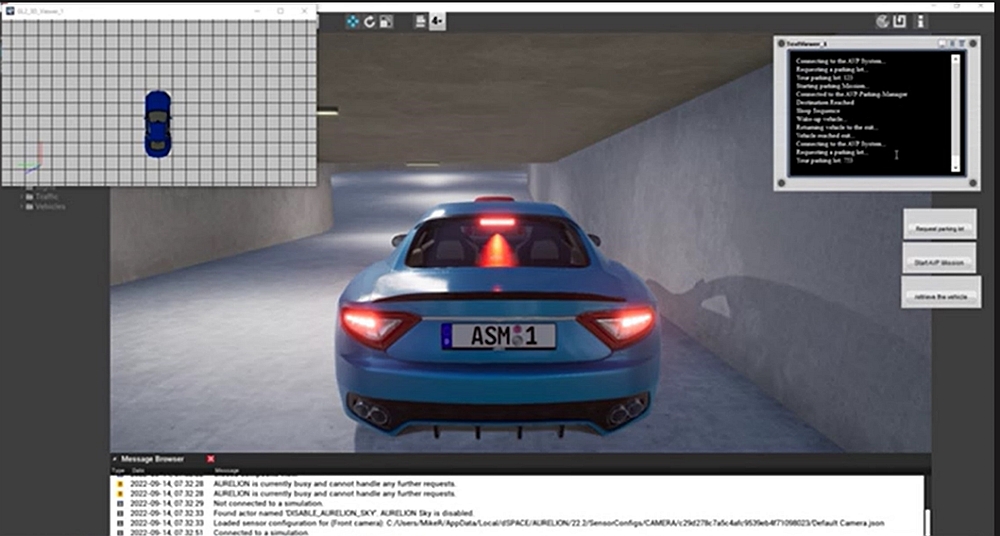
Le logiciel de Dspace, au sein duquel le système AVP est installé, intègre et simule sur PC l’ensemble des informations liées à l’environnement, à l’infrastructure, aux capteurs et au véhicule. Les commandes de contrôle du mouvement du véhicule (VMC) générées par le système AVP sont transmises à l’application embarquée qui pilote le véhicule. La communication 5G réalisée entre le véhicule et le système AVP s’effectue grâce au simulateur de station de base 5G d’Anritsu. Les commandes VMC transitent par l’émulateur du réseau d’Apposite avant d’être transmise à l’application de contrôle embarquée au véhicule. Des retards de transmission de données IP et des pertes de paquets de données sont ajoutés par l’émulateur. Ce qui entraîne une instabilité du contrôle du véhicule. Les développeurs d’AVP doivent donc concevoir des solutions pour assurer la stabilité du contrôle du véhicule.



