


- Les véhicules exploitent de plus en plus couramment des applications embarquées pour échanger des données avec des plates-formes Cloud, via un réseau radio mobile, en partageant leur position et en obtenant des informations utiles comme les avertissements de danger, ou encore des informations sur le trafic ou les places de parking disponibles. Cela crée de nouveaux usages de la voiture, comme la location-partage ou le covoiturage.
- La validation de ces applications repose sur des procédure de test spécifiques exigeant la simulation de l’environnement réel au sein duquel évoluera le véhicule ainsi que du réseau de communication mobile qu’il exploitera pour interagir avec son environnement.
- Cet article explique en quoi la combinaison d’outils de simulation de conduite avec des solutions d’émulation de réseau radio permet d’accélérer et de simplifier les procédures de test des systèmes avancés d’aide à la conduite (ADAS) en réduisant le nombre d’essais réalisés sur route.
Auteur : François Ortolan d’Anritsu EMEA
Soyons réalistes, les voitures modernes sont devenues des smartphones sur roues. Tous les services fournis par les smartphones ont été portés ou rattachés aux systèmes d’info-divertissement à bord. Ces dernières années, le secteur est allé au-delà des smartphones et a commencé à créer des applications et des services sur mesure directement pour l’automobile. On les désigne en général sous le vocable « services télématiques ».
Les prochaines générations de ces applications fourniront aux véhicules les dernières mises à jour logicielles et des données cartographiques HD actualisées et précises indispensables à une conduite autonome en temps réel. Les applications sont désormais plus étroitement intégrées au véhicule et imposent des exigences élevées en matière de débit de données, de latence et de fiabilité de l’interface radio mobile.
Les services télématiques aident à la prise de décision par le conducteur, ou par les algorithmes qui pilotent le véhicule autonome, tels que les systèmes ADAS (système avancé d’aide à la conduite). Les systèmes ADAS, s’appuient sur différents capteurs pour prendre des décisions optimales en matière de sûreté et de sécurité. Ces systèmes ont commencé par utiliser des capteurs comme le radar de détection des distances et des objets. Pour améliorer leur représentation du monde environnant, les systèmes ADAS ont ensuite fusionné des informations provenant d’autres sources comme la vidéo et le Lidar. Cela permet de construire un modèle 3D du monde entourant le véhicule. Toutefois, l’une des principales limites est l’incapacité à percevoir au-delà de la ligne de vue. C’est là que les réseaux sans fil s’avèrent utiles pour communiquer avec l’infrastructure ou avec les autres véhicules. La connectivité des voitures devient aujourd’hui un complément essentiel de la sûreté et de l’expérience utilisateur.
Tests routiers et tests virtuels
L’une des approches pour tester les ADAS et les services télématiques est d’aller sur la route. Les tests routiers nécessitent des millions de kilomètres pour valider les implémentations, même en acceptant que toutes les situations possibles ne puissent être rencontrées. Reproduire un scénario donné pour effectuer des tests est difficile, et tester la communication sans fil dans le cadre d’un scénario donné est particulièrement ardu. La performance du réseau cellulaire peut fluctuer en fonction des conditions météorologiques, de la charge des usagers et de la disponibilité du réseau requis (LTE, 5G …).
Simuler le monde en laboratoire est une bonne solution pour obtenir des résultats reproductibles. Cela permet également de réduire le coût et le temps nécessaires pour valider les différentes versions avant d’aller sur la route. Le test routier est considéré comme indispensable, mais il est désormais considéré comme la dernière étape des tests.
Boucle ouverte ou boucle fermée
Traditionnellement, les voitures connectées sont testées en laboratoire de la même manière que les smartphones le sont. En s’appuyant sur une suite de situations de test prédéfinies qui peuvent être jouées de manière séquentielle, des stimuli connus sont appliqués et on s’assure que les résultats obtenus soient dans la fourchette attendue ou correspondent à un comportement attendu. C’est ce qu’on appelle le test en boucle ouverte.
Toutefois, compte tenu du cycle de vie et des exigences en matière de fiabilité, de sûreté et de longévité, il est apparu que cette approche ne suffisait pas. Une représentation plus fidèle du monde réel est indispensable, et nécessite de s’éloigner des situations de test et des scénarios d’utilisation prédéfinis.
C’est pourquoi la conduite virtuelle devient un outil essentiel pour la pré-validation. Dans un scénario de monde virtuel, il faut reproduire les mêmes conditions initiales, mais les décisions prises par le véhicule ont un impact en temps réel sur les stimuli qui lui sont appliqués. C’est ce que l’on appelle le test en boucle fermée.
Logiciel dans la boucle ou matériel dans la boucle
Cette méthodologie issue du monde de l’automobile est appelée SiL (Software in the Loop, ou logiciel dans la boucle) ou HiL (Hardware in the Loop, ou matériel dans la boucle). Dans les deux cas, un monde en 3D est généré et des scénarios sont utilisés.
Le logiciel dans la boucle (SiL) ne fournit qu’un moyen de tester l’algorithme de fusion des capteurs dans le cadre d’une simulation.
Le matériel dans la boucle (HiL) va au-delà de la simulation, en appliquant un véritable stimulus émulé sur les capteurs de la plateforme matérielle sur laquelle tourne l’algorithme.
Actuellement, le « logiciel dans la boucle » (SiL) représente 95% de la conduite virtuelle pour les voitures autonomes. Seulement 5% est réalisé en mode « matériel dans la boucle » (HiL). Les tendances dans le secteur du test indiquent que davantage de validation est nécessaire lorsque du matériel est en jeu.
Tester la connectivité de la télématique vers Cloud dans le cas HiL
L’approche en boucle fermée pour les tests télématiques, que propose cet article, est nouvelle dans le secteur.
Cette approche consiste à équiper un système HiL d’un émulateur de réseau radio mobile qui permet de fournir un réseau de test réaliste, composé de stations de base (réseau d’accès radio) et d’un réseau central radio mobile (Core Network). La simulation HiL peut servir à valider l’ensemble de la chaîne d’effets, depuis l’application à bord du véhicule jusqu’à la communication réaliste, en passant par les services cloud. Cet article présente un cas d’utilisation issu de la collaboration entre dSPACE pour le système HiL, et Anritsu pour le simulateur (2G/3G/LTE/5G).
L’émulateur d’Anritsu peut être connecté directement à Internet ou à un serveur backend pour pouvoir échanger des données entre le service cloud et l’application testée dans le véhicule. Des câbles coaxiaux ou des antennes permettent de relier l’émulateur à l’unité de communication. Dans le cas d’antennes, les signaux radio doivent être correctement protégés des interférences extérieures.
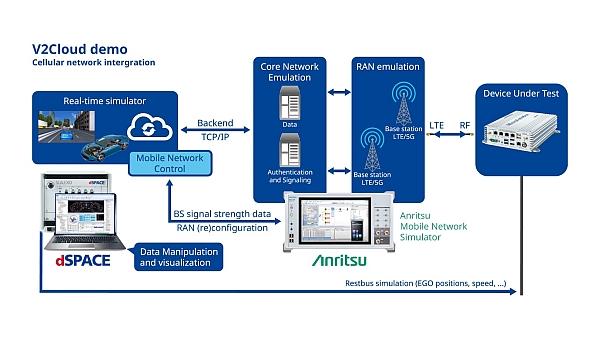
On peut contrôler l’émulateur de réseau mobile depuis le simulateur HiL en utilisant un blockset Simulink (ensemble de blocs logiciels Simulink). Cela permet de reconfigurer le réseau mobile pour faire varier le débit de données ou la latence par exemple. Cela permet aussi de gérer certains scénarios de mobilité, comme le « handover » (transfert de la communication d’une cellule à une autre). Lors d’un test de conduite virtuelle, la liaison radio est transférée d’une station de base à l’autre sans perdre la liaison de données. Une autre situation fréquente à tester est la perte de communication liée à l’éloignement et au déplacement, quand le signal radio devient de plus en plus faible, voire disparaît complètement pendant la conduite. Le blockset supporte le testeur de signalisation Anritsu MD8475B (2G/3G/LTE) et est prêt pour la 5G en association avec le testeur de communication 5G d’Anritsu (MT8000A).
La conduite virtuelle ouvre la voie à l’homologation
La communauté de la conduite virtuelle s’active à définir les scénarios nécessaires à la validation des voitures autonomes. Réduire le nombre infini de situations que l’on peut rencontrer sur la route à un sous-ensemble de scénarios fondamentaux est un travail crucial. Ce sous-ensemble ouvrira la voie aux législateurs pour élaborer un cadre permettant de valider la sûreté des systèmes ADAS et des véhicules autonomes. Pour l’instant, les scénarios se concentrent sur les conditions environnantes susceptibles d’influencer les entrées des capteurs actuels tels que radar, vidéo et Lidar.
Cependant, à l’avenir les télécommunications devraient jouer un rôle croissant dans la prise de décision concernant la fusion des capteurs des voitures autonomes. Avec l’évolution des communications sans fil vers la 5G, plus adaptée aux besoins de l’automobile, de plus en plus de fonctionnalités telles que le « Vehicle-to-Everything » (C-V2X ou communication entre le véhicule et tout ce qui l’entoure) vont devenir indispensables à la sûreté et à la sécurité. Les conditions environnantes comme la couverture radio joueront un rôle clé dans la définition des scénarios.
L’un des cas d’utilisation les plus intéressants de la 5G est le partage de capteurs et la conduite à distance. Un système « matériel dans la boucle » (HiL) à connectivité cellulaire constitue le banc de test parfait pour la recherche, le prototypage et la validation de ses caractéristiques 5G.






