


- Les systèmes avancés d’assistance à la conduite (ADAS), les dispositifs de sécurité embarqués et la connectivité croissante des véhicules nécessitent l’exploitation dans l’automobile de réseaux présentant une large bande passante.
- La technologie Ethernet automobile (Automotive Ethernet) promet d’accroître les performances de communication et de faciliter l’intégration des sous-systèmes du véhicule.
- Cependant, il convient de précisément caractériser les signaux véhiculés par le réseau Automotive Ethernet.
- Tektronix présente une méthode visant à surmonter les problèmes liés aux tests d’intégrité du signal Automotive Ethernet au niveau du système.
Auteur : Lee Morgan, Responsable marketing technique sénior, chez Tektronix
Le passage aux systèmes avancés d’assistance à la conduite (ADAS), aux systèmes de sécurité intelligents et aux voitures connectées et autonomes nécessite une mise en réseau embarquée fiable et des connexions à large bande passante. Les voitures peuvent désormais contenir jusqu’à 100 modules de commande électroniques (ECU) connectés à des capteurs embarqués à un véhicule par le biais des multiples faisceaux de câbles. Les réseaux automobiles traditionnels tels que CAN, CAN-FD, LIN, MOST et FlexRay ne fournissent tout simplement pas la bande passante nécessaire pour prendre en charge tous les dispositifs et applications présents dans les voitures modernes, et encore moins les voitures autonomes connectées du futur.
La nécessité d’accroître les performances et l’intégration à travers les sous-systèmes du véhicule provoque la transition vers la technologie Automotive Ethernet. Bien que la norme automobile tire son origine d’Ethernet, elle intègre d’importants changements au niveau de la couche physique pour répondre aux exigences de l’automobile. La première version de la norme portait le nom de BroadR-Reach et est remplacée par les versions IEEE connues sous les noms de 100BASE-T1 (802.3bw) et 1000BASE-T1 (802.3bp).
La norme actuellement utilisée sur la plupart des voitures est 100BASE-T1, qui prend en charge le fonctionnement à 100 Mbps dans un environnement automobile très bruyant du point de vue des signaux électroniques en présence. Ce débit de données est nettement plus rapide que les systèmes de bus traditionnels tels que le bus CAN. Les futurs modèles utiliseront 1000BASE-T1, à 10X le débit de données. Au fur et à mesure que la signalisation passe à des débits de données plus élevés, le besoin d’une validation de la conception complète au niveau du système l’est également, afin de garantir l’interopérabilité et un fonctionnement fiable des nombreux ECU et capteurs. De ce fait, les considérations de conception qui avaient été négligées dans le passé commencent maintenant à être prises en compte.
Pour obtenir une plus grande largeur de bande passante, l’Automotive Ethernet utilise une liaison de communication en duplex intégral via un câble à paire torsadée offrant des capacités de transmission et de réception simultanées avec la signalisation PAM3. La communication en duplex intégral avec la signalisation PAM3 peut rendre très complexe la visualisation du trafic Automotive Ethernet et les tests d’intégrité du signal. Cet article explore une nouvelle méthode permettant de relever un défi majeur lors du test de communications en duplex intégral au niveau des systèmes, à savoir la nécessité de couper les câbles pour accéder aux signaux en duplex intégral.
Pourquoi des tests au niveau du système ?
Les spécifications de test pour l’Automotive Ethernet ont été définies par OPEN Alliance pour les composants, les canaux et l’interopérabilité, englobant l’intégration des ECU, des connecteurs et des câbles non torsadés. Afin de répondre aux exigences de fiabilité, les tests doivent être effectués dans les conditions bruyantes rencontrées dans le véhicule. Cela nécessite à son tour la capacité de caractériser et de visualiser l’intégrité du signal et le trafic au niveau du système dans des conditions réelles.
Voici quelques exemples de tests d’intégrité du signal au niveau du système que vous souhaiterez peut-être réaliser :
• Test de qualité du signal TC8
• Caractérisation et test des composants de l’ECU
• Caractérisation et test du câble, des connecteurs, de la longueur des câbles et du routage de l’Automotive Ethernet
• Test de susceptibilité électromagnétique (EMS) ou de bruit gaussien
• Test d’injection de courant en vrac
• Test de l’unité de production
• Impact du système automobile sur les performances de l’Automotive Ethernet
◦ Moteur à courant continu en marche/arrêt
◦ Moteur en marche/arrêt
• Débogage du système Automotive Ethernet
Idéalement, vous devez effectuer des tests d’intégrité du signal lors de la phase d’intégration du véhicule pour sélectionner les câbles, vérifier les performances de l’ECU dans des conditions de bruit électromagnétique, déterminer la longueur et le routage optimaux des câbles, etc. Pour ce type d’analyse, un diagramme de l’œil généré par un oscilloscope est l’outil le plus précieux pour visualiser la santé du système. Il fournit des informations sur la santé globale de la couche physique (PHY) et peut aider à identifier les erreurs dues à des températures plus élevées ou au bruit. De même, lors de l’utilisation de passerelles convertissant des bus CAN ou d’autres bus traditionnels à l’Automotive Ethernet et inversement, des mesures temporelles précises au niveau du système sont essentielles pour déterminer le temps de latence.
Le débit de données de 100 Mb/s de l’Automotive Ethernet nécessite un oscilloscope tel que celui illustré à la Figure 1, avec une bande passante d’au moins 1 GHz et des taux d’échantillonnage élevés. Pour 1000BASE-T1, la bande passante requise atteint la plage des 2 GHz. Idéalement, des oscilloscopes équipés d’un progiciel d’analyse PAM3 avec récupération d’horloge logicielle sont nécessaires afin de mieux comprendre les caractéristiques du signal pour la validation et la caractérisation des conceptions PAM3 avec différentes longueurs de câble, différentes conditions de bruit ou configurations de l’ECU.

Difficultés liées aux tests en duplex intégral
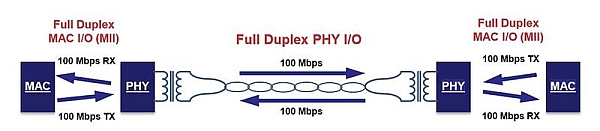
La communication en duplex intégral associée à la signalisation PAM3, bien que vitale pour les performances de l’Automotive Ethernet, ajoute à la complexité de la validation des ECU dans des conditions réelles. La plupart des bus série standards fonctionnent en mode simplex avec un seul périphérique qui communique à la fois ou avec une liaison séparée pour l’émetteur et le récepteur. En revanche, avec l’Automotive Ethernet, les dispositifs maître et esclave communiquent simultanément sur la même liaison. (Voir Figure 2.)
En conséquence, les signaux du maître et de l’esclave se superposent. Étant donné que le maître sait quelles données il a envoyées, il peut déterminer le signal de l’esclave à partir du signal superposé et inversement. Bien que l’émetteur-récepteur soit conçu pour gérer cette situation, il est pratiquement impossible sur un oscilloscope d’isoler le signal pour le test d’intégrité du signal ou le décodage de protocole. La Figure 3 montre un exemple de signal Automotive Ethernet sans séparation des signaux maître et esclave.
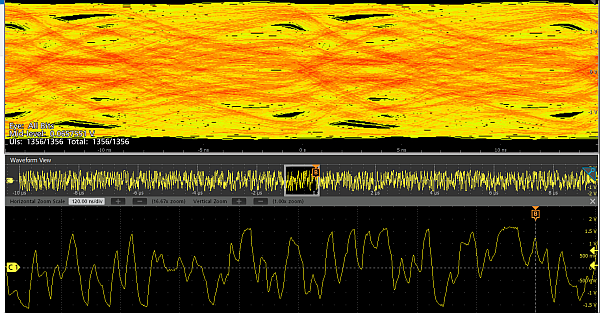
Comme le montre cet exemple, pour effectuer une analyse d’intégrité du signal sur une liaison et un décodage de protocole dans un environnement système réel sur un oscilloscope, les concepteurs d’automobiles doivent examiner chaque liaison séparément, ce qui nécessite la séparation des signaux avant toute analyse.
Séparation des signaux PAM3 de l’Automotive Ethernet
Il existe actuellement deux méthodes pour séparer les signaux maître et esclave. La première est la méthode existante qui nécessite de couper le câble Automotive Ethernet et d’insérer un coupleur directionnel pour séparer et tester les signaux. Cette méthode présente des inconvénients inhérents pour réaliser des tests précis avec un minimum de perturbations. Plus récemment, les fabricants de tests ont introduit une nouvelle méthodologie qui utilise un logiciel et des sondes pour séparer les signaux de manière non intrusive, permettant ainsi aux ingénieurs de visualiser les signaux réels avec une plus grande clarté. Cette méthode répond aux inconvénients de la méthode traditionnelle des coupleurs directionnels, mais permet-elle une précision de mesure accrue ?
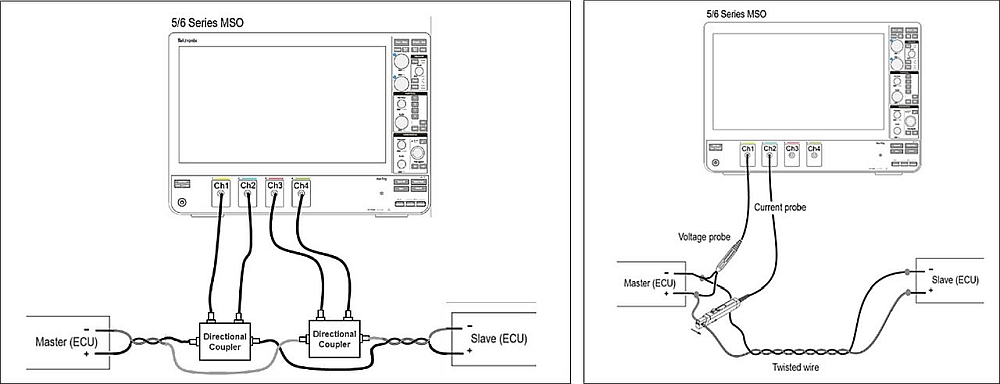
Pour comparer directement les deux méthodes, nous avons d’abord effectué des tests à l’aide de la méthode logicielle permettant de séparer les signaux ainsi que les sondes de courant et de tension. Nous avons ensuite sectionné le câble Automotive Ethernet et inséré les coupleurs directionnels avec des connecteurs SMA. Comme le montre la Figure 4, la configuration de l’approche logicielle est beaucoup plus simple et moins complexe. Nous avons effectué les mêmes tests dans les mêmes conditions et comparé les résultats.
Coupleur directionnel
Comme nous l’avons indiqué, la méthode du coupleur directionnel nécessite de sectionner le câble Automotive Ethernet et d’insérer un coupleur directionnel pour séparer le trafic. Il n’est pas facile de couper le câble au niveau du système, ce qui rend cette méthode moins adaptée à la plupart des applications de test au niveau du système.
Bien que cette approche donne effectivement accès aux signaux maître et esclave, elle introduit une perte d’insertion et de retour, ce qui peut rendre difficile de déterminer si une erreur résulte du système ou du matériel supplémentaire. Et, s’il est possible de supprimer les effets du coupleur directionnel, le désembarquement peut amplifier le bruit dans le système et avoir un impact sur la précision de la mesure et de la caractérisation.
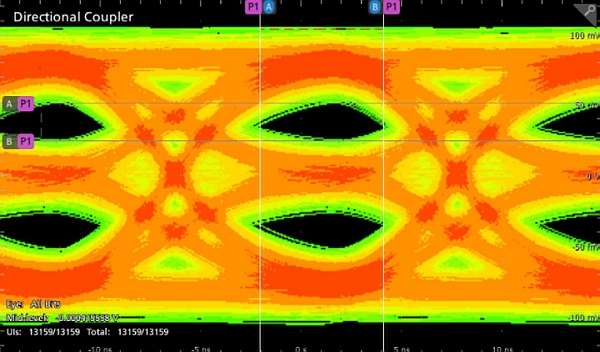
Le diagramme de l’œil obtenu à la Figure 5 illustre l’impact des pertes d’insertion et de retour sur les signaux Automotive Ethernet lorsqu’un coupleur directionnel est installé. Comme on le voit, l’amplitude maximale n’est que de 100 mVpp lorsque le coupleur directionnel et la perte d’insertion et de retour ferment le diagramme de l’œil.
Séparation de signaux par logiciel
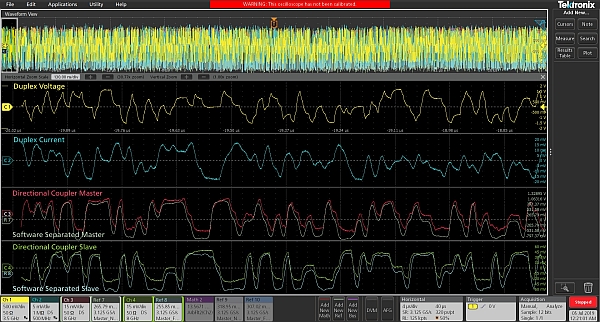
Contrairement au coupleur directionnel qui utilise une approche matérielle pour séparer les signaux, l’approche logicielle sépare le signal en duplex intégral en examinant les formes d’onde de tension et de courant des points de test maître et esclave et en fournissant des signaux séparés à l’aide d’algorithmes logiciels. Une telle solution logicielle élimine la nécessité de couper le câble Automotive Ethernet et affiche les signaux maître et esclave sans ajouter de perte d’insertion et de retour. Et il n’est pas nécessaire de se préoccuper de désembarquement.
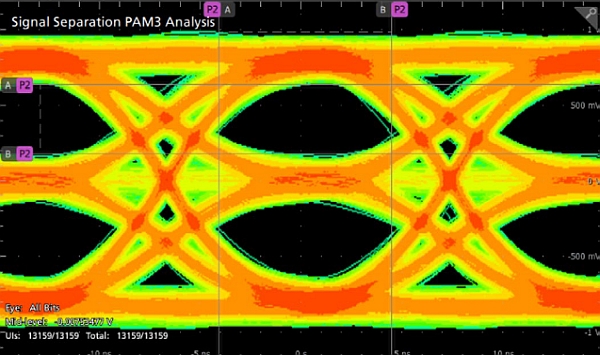
Comme le montre la Figure 6, l’approche logicielle améliore la qualité du signal avec des diagramme de l’oeil plus « propres ». Cela fournit une représentation beaucoup plus précise des signaux Automotive Ethernet pour les mesures de la qualité du signal et améliore la capacité d’identifier les problèmes potentiels de performances en moins de temps et avec une plus grande confiance.
Comparaison crête à crête
Comme on peut le voir sur la Figure 7, une comparaison des tensions crête à crête a montré une différence d’amplitude significative entre les deux méthodes. Dans le cas de la méthode du coupleur directionnel, l’amplitude était d’environ 90 mVpp pour le maître et de 85 mVpp pour l’esclave. En comparaison, l’approche logicielle avait une amplitude d’environ 1,5 Vpp pour le maître et de 1,45 Vpp pour l’esclave. Sur la base de cette comparaison, le coupleur directionnel réduit la force du signal de 20 dB, ce qui représente une perte importante lors de l’évaluation des cas extrêmes, par exemple.
Pour compenser les discontinuités introduites par le coupleur directionnel, le désembarquement était nécessaire pour compenser les pertes d’insertion et de retour. S’il est possible d’éliminer les effets du coupleur directionnel, le désembarquement peut amplifier le bruit dans les systèmes et avoir un impact sur la précision de la mesure et de la caractérisation. Il convient également de noter que le désembarquement peut prendre beaucoup de temps et s’avérer difficile. De plus, lors des tests au niveau du système et de l’entretien d’un véhicule, il peut être difficile de sectionner le câble et d’installer des coupleurs directionnels.
En comparaison, la méthode logicielle illustrée ici montre le vrai signal sans perturber le système. Cette nouvelle méthodologie de test Automotive Ethernet permettra aux ingénieurs de caractériser les signaux plus rapidement et plus précisément. Cette méthode permet de surmonter de nombreux problèmes liés aux tests d’intégrité du signal Automotive Ethernet au niveau du système et ouvre la voie à un large éventail de nouveaux cas d’utilisation qui étaient auparavant très difficiles ou inaccessibles.
- À propos de l’auteur
Lee Morgan est Directeur marketing technique sénior chez Tektronix, spécialisé dans les secteurs Embedded, Power et Automotive. Il possède plus de 20 ans d’expérience dans le secteur des tests & mesures, après avoir occupé différents postes dans l’industrie des télécommunications mobiles, l’électronique et l’énergie.






