
- Dspace et Mathworks étendent leur collaboration visant à renforcer l’intégration entre leurs outils de simulation dédiés au développement des systèmes de conduite autonome.
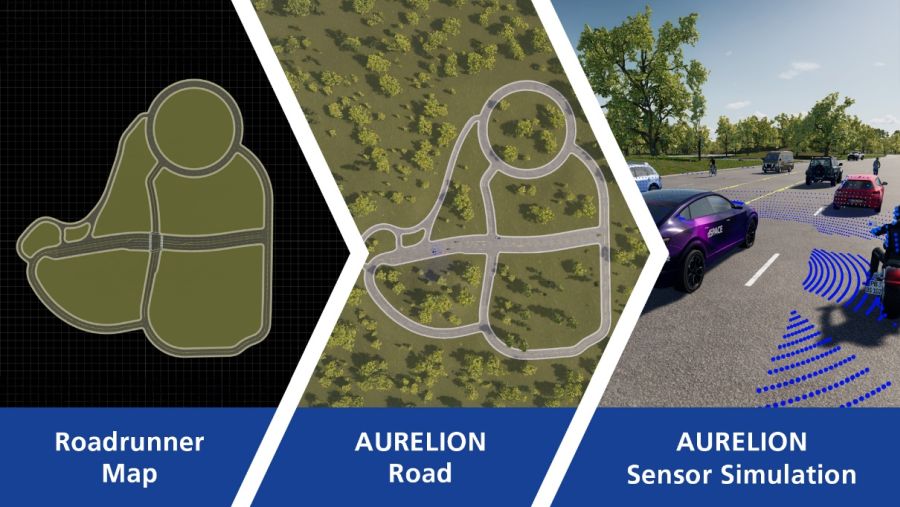
- Cette évolution permet désormais l’utilisation directe, au sein d’ASM OpenX de Dspace, des modèles de routes conçus avec RoadRunner, l’éditeur de scénarios et d’infrastructures routières de Mathworks.
ASM OpenX constitue la nouvelle génération de modèles de trafic développée par Dspace. Il repose nativement sur les standards ouverts OpenScenario XML et OpenDrive, utilisés dans les environnements de simulation pour véhicules autonomes. Cette approche vise à supprimer les étapes intermédiaires de conversion des scénarios et des modèles de routes, souvent sources d’erreurs et de reprises manuelles, et à simplifier l’intégration dans les chaînes d’outils de simulation existantes.
RoadRunner est un environnement interactif permettant la création de réseaux routiers détaillés, de scènes 3D et de scénarios de trafic. Il prend en charge les standards OpenDrive et OpenScenario et propose des interfaces programmatiques facilitant l’automatisation et la personnalisation des modèles. Son intégration avec ASM OpenX permet aux équipes de développement d’exploiter directement des descriptions de routes compatibles avec OpenDrive dans les simulations de trafic de Dspace.
Selon les deux partenaires, cette interopérabilité fondée sur des standards ouverts vise à améliorer l’efficacité des phases de conception et de validation des fonctions de conduite automatisée. Elle permet de travailler sur une gamme étendue de configurations routières et de scénarios, couvrant différents domaines de conception opérationnelle (Operational Design Domain – ODD), tout en réduisant les délais liés à la préparation des simulations.
Cette extension du partenariat s’inscrit dans une tendance plus large du secteur consistant à favoriser l’adoption de standards ouverts pour faciliter l’échange de données entre outils, améliorer la cohérence des simulations et soutenir le développement de technologies de conduite autonome dans des environnements de test virtuels de plus en plus complexes.



